
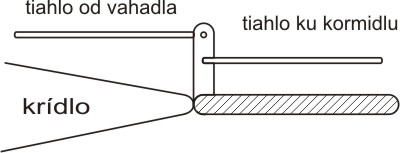
Riadenie upútaných modelov, zjednodušene povedané, delíme podľa vývodu laniek. Prvý spôsob je vývodlaniek pod, respektíve nad krídlo a druhý v krídle. Bez ohľadu na to, či bude mechanizmus tiahel skrytý v trupe, alebo nie, je tiahlami ovládané výškové kormidlo.
Základnou ovládanou funkciou všetkých upútaných modelov je výškovka. Jej výchylky by mali byť symetrické, medzi 20o – 30o nahor a dolu. Pri správnej konštrukcii riadenia, by sa mali výchylky riadenia zhodovať s výchylkami rukoväte. Aby to tak bolo, treba dodržať určité základné pravidlá. Tým najdôležitejším pravidlom je dodržanie pomerov jednotlivých vzdialeností tak, ako to je znázornené na nasledujúcom obrázku. V minulosti bol zaužívaný názor, že pomer "P" prevodu sa musí pohybovať v rozmedzí 1,5 až 2,0; ako je to znázornené na obrázku 1.
Nie je to však ideálne, nakoľko potom je aj prevodový pomer medzi rukoväťou a samotným výškovým kormidlom príliš do pomala, zvlášť na lietanie akrobatických prvkov a model tak reaguje na pohyby ruky spomalene. Najideálnejší pomer je 1:1 - 100 mm rozostup laniek na rukoväti, 100 mm rozostup laniek na hlavnom ramene vahadla, 20 mm dĺžka páky vahadla 20 mm, rovnako 20 mm dĺžky pák na klapkách a výškovke.
Iný pomer je možné voliť pre modely kategórie F2A a F2C, kde sú ale aj rozostupy laniek na rukoväti podstatne menšie, a síce 25 mm. To je z dôvodu toho, aby tieto modely nereagovali na riadenie príliš ostro a preto sa používajú vahadlá s rozostupom laniek maximálne 30 mm a menej pre tieto kategórie a dĺžky pák potom maximálne 8 mm. Samotné vahadlo pre rýchlostné modely máva z dôvodu autostabilizácie os posunutú o približne 6 mm pred os zavesenia samotných riadiacich strún, ale nemusí to tak byť (obr.2).

obr.1

obr.2
Ďalší spôsob ovládania, je pomocou tretieho lanka. Lanko musí vychádzať z trupu za osou vahadla, aby pri ovládaní nestáčalo model do kruhu. Druhý koniec je prichytený na rukoväti. Vďaka tomu, že lanko je napínané odporom vzduchu, musí byť ovládací mechanizmus držaný neustále v predpätí pomocou pružiny, ktorá zamedzuje jeho predčasné spustenie. Takýto mechanizmus je vhodný na ovládanie odhodenia bômb, ovládanie podvozku, prípadne ku spúšťaniu programového kotúča vo vnútri trupu, ktorý aktivuje jednotlivé funkcie ovládané mechanizmami. Nehodí sa však na ovládanie otáčok motora a klapiek. Na to je vhodnejší spôsob, ktorý nepotrebuje predpínaciu pružinu, nevadí mu odstredivá sila a je ním možné ovládať otáčky motora aj na modeli stojacom na zemi. Vyššie spomenuté požiadavky spĺňajú mechanizmy s posuvným alebo dvojitým, prípadne trojitým vahadlom.

obr. 3
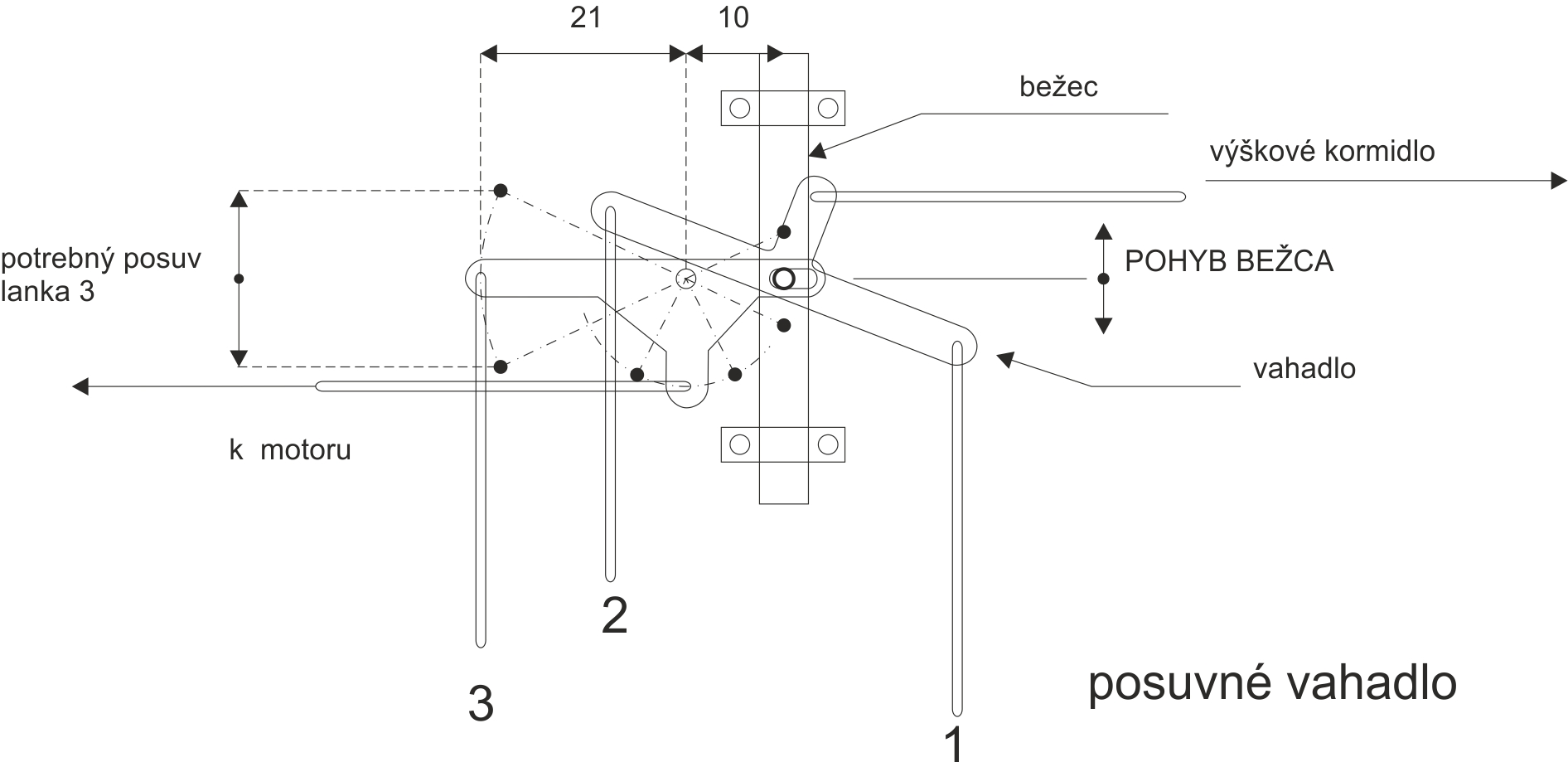
Upútané modely ale nie sú iba školnou kategóriou, u ktorej vystačíme iba s dvojlankovým riadením. U modelov makiet je potrebné počas letu ovládať otáčky motora, prípadne ďalšie funkcie (klapky, podvozok, odhodenie bômb a iné). Na ovládanie týchto funkcií sa používa niekoľko spôsobov. Základné a konštrukčne najjednoduchšie je ovládanie funkcie spojené s výškovkou (obr. 4). Tento systém pracuje tak,že v krajnej polohe výchylky výškovky sa napne pomocné lanko a následkom toho sa vykoná požadovaná funkcia. Princíp je síce jednoduchý ale pomerne nevýhodný, pretože k vykonaniu funkcie vždy príde aspoň na krátky čask ovplyvneniu charakteru letu (úplné natiahnutie alebo potlačenie výškovky). Preto sa tento systém uchytil len v kategóriách F2A a F2C ku zhasínaniu motora.
Princíp systému je na obrázku dole, na obrázku 4. Vahadlo ovládajúce výškovku je otočne uchytené v bežci na čape. Bežec sa môže vo vodidle posúvať vyznačeným smerom. Posun bežca prebieha prostredníctvom pomocného vahadla, ktoré je uchytené otočne na pevnom čape a prostredníctvom lanka 3.
Pri ovládaní výškovky lankami 1a 2 sa nepohybuje lanko 3 a nemení sa teda nastavenie otáčok motora. Pritiahnutím, alebo povolením lanka 3 sa nemení vzájomné nastavenie laniek 1 a 2 , iba sa posunie pomocným vahadlom hlavné vahadlo a zmení sa nastavenie motora, a to bez zmeny nastavenia výškovky. Všetky lanká sú za letu zaťažené rovnakou silou, čo je dané geometrickou podmienkou vzdialeností otvorov na pomocnom vahadle. Posuv lanka 3 je rovný približne dvojnásobku posuvu laniek 1 a 2. Schéma rukoväte pre toto riadenie je na obrázku 6.
obr. 4
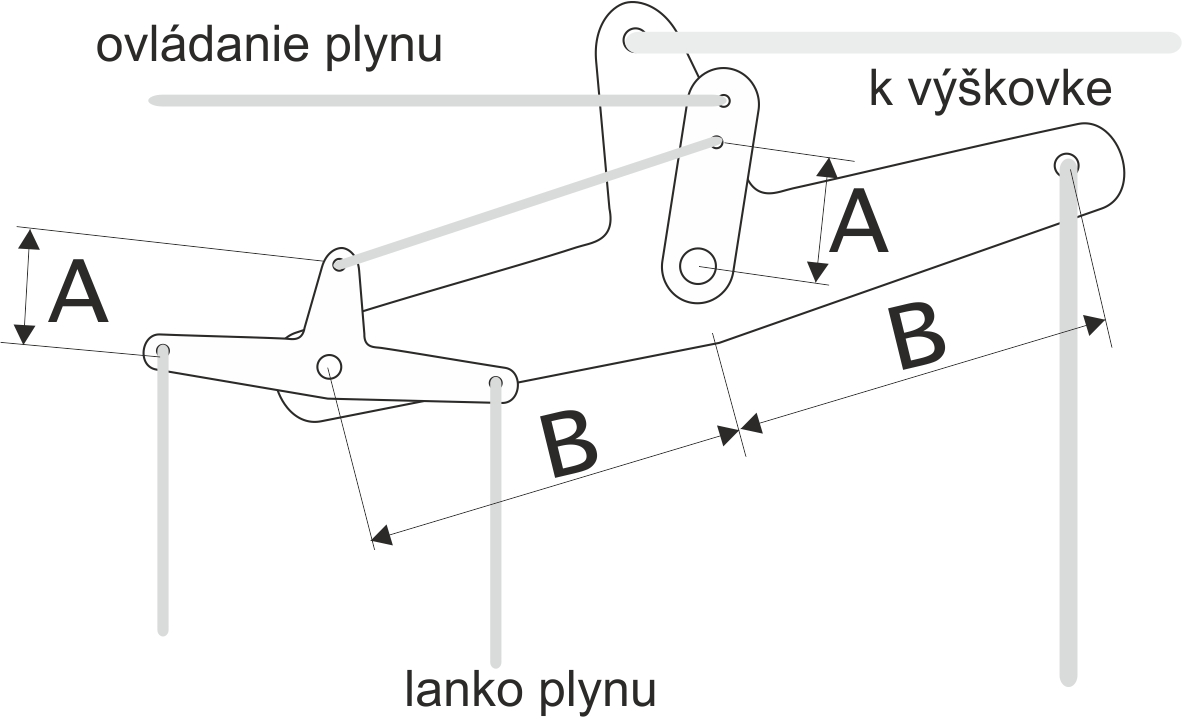
Konštrukčne jednoduchší, a preto aj rozšírenejší je princíp viacnásobných vahadiel. Riadenie využíva mechanizmus známy pod názvom "paralelogram"(obr.5). Pri konštrukcii a výrobe musíme dbať, aby rozostup otvorov A boli zhodné. ďalej musia byť zhodné rozostupy hlavného vahadla B, s dĺžkou spojovacieho vahadla C. Princíp systému spočíva v tom, že pokiaľ sa spoločne pohybujú lanká 1 a 2 opačným smerom ako lanko 3, tak je ovládaná iba výškovka a nastavenie otáčok motora zostáva zachované. Ale ak pohneme iba lankom 1 voči lanku 2, pričom sa nepohybuje lankom 3, sú ovládané iba otáčky motora a nemení sa poloha výškovky. Tento mechanizmus sa môže použiť aj s trojnásobným vahadlom na ovládanie troch prípadne viacerých funkcií, s použitím štyroch laniek.
Takéto mechanické systémy už ale v súčasnosti vyrába málokto, keďže sú cenové relácie za elektronické komponenty ako sú servá, či riadiace jednotky postavené na jednočipových mikroprocesoroch pomerne nízke a samotné súčiastky a diely sú veľmi dobre dostupné. Prevážna väšina modelárov, ktorí sa maketami a sofistikovanými polomaketami zaoberajú, používa práve elektronické riadenie.
V takom prípade je celá riadiaca logika buď priamo v rukoväti, alebo v ju má pilot v dosahu voľnej ruky (napríklad v samostatnej krabičke s ovládacími prvkami na opasku) a signál sa prenáša prostredníctvom už len dvojlankového riadenia, pričom lanká sú od seba navzájom izolované.
 obr. 5
obr. 5
Najvhodnejšía a z hľadiska spoľahlivosti najlepší spôsob, ako riadenie urobiť, je schematicky znázornený na nasledujúcich obrázkoch. Treba si uvedomiť, že na tomto kúsku oceli, bude zavesený celý model. Pri letovej rýchlosti a statickej hmotnosti bude odstredivá sila dosahovať úctyhodných hodnôt. O tom, ako sa dá vypočítať, si povieme neskôr.
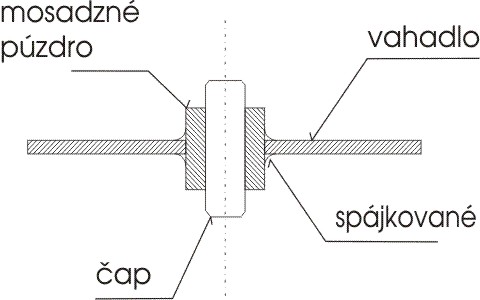
Preto musí byť vahadlo vyrobené z oceľového plechu hrúbky 1 mm, pre modely kategórie F2B, prípadne väčšie a ťažšie modely z 1,5 až 2 mm. Bod otáčania - otvor v jeho strede vypúzdrime mosadzným puzdrom tak, že puzdro prispájkujeme do vahadla. Otvor v tomto ložisku musí byť natoľko presný, aby sa dalo ľahko nasunúť a otáčať na čape, ale aby malo minimálnu vôľu (obr.6)
 obr. 6
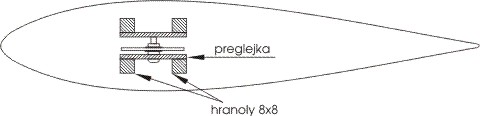
obr. 6 Takto urobené vahadlo je možné umiestniť do krídla rôznymi spôsobmi. Ale jeden odporúčam pre jeho presnosť a spoľahlivosť. Spočíva v montáži vahadla medzi dve zosilnené, stredové rebrá, na dvoch preglejkových čelách.
Obidve musia mať obdĺžnikový, alebo štvorcový pôdorys a otvor na umiestnenie čapu, musí byť vŕtaný do oboch čiel naraz. Čelá musia byť vyrobené z kvalitnej "leteckej" (viac vrstvovej) preglejky, hrúbky 3 mm. Ako čap tu slúži skrutka M3, u väčších modelov M4.
Do vahadla najprv zasunieme tiahla a karabínky s oceľovými lankami, ktoré vychádzajú z krídla. Až potom skompletizujeme a osadíme medzi stredové rebrá.
 obr.7
obr.7
Ďalším prvkom je prepojenie kormidla a klapiek tiahlami. Najvhodnejší spôsob, je použitie oceľového drôtu s priemerom 2mm, napríklad špice do bicyklového kolesa. Je malá pravdepodobnosť, že sa podarí zohnať špice dostatočnej dĺžky, aby bolo tiahlo z jedného kusu a preto ich budeme musieť spája. ABSOLÚTNE NAJNEVHODNEJŠIE sú na tento účel mosadzné svorky, ktoré sa nazývajú čokoládky, či "lustersvorky". Síce sa pohodlne na tiahlo aplikujú a umožňujú vďaka skrutkám pohodlné nastavovanie, ale vibráciami sa sa tieto skrutky dokážu povoliť a vďaka tomu sa rozpojí tiahlo riadenia, čo vlastne spôsobí haváriu modelu.
Preto odporúčam NEPOUŽÍVAŤ!
Najspoľahlivejším spôsobom spojíme dve časti tiahla tak, že zarovnáme kormidlo aj klapky do "nuly", presahujúce konce oboch častí tiahla priložíme k sebe a bodovo zospájkujeme. Potom spoj nahusto ovinieme mäkkým drôtom, najlepšie medeným a celý spoj dôkladne zospájkujeme. Neznamená to ale, že tam musíme použiť veľa cínu - "menej je niekedy viac".
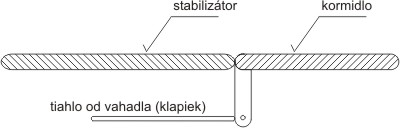 obr. 8
obr. 8 V prípade, že zvolíme model s klapkami, je nutné ich mechanicky prepojí s výškovkou. Prvou "fázou" je prepojenie vahadla a klapiek, tu postačí kratší kus špice. Druhou "fázou" je prepojenie klapiek s kormidlom, hore uvedeným spôsobom. Jemné doladenie polohy klapiek voči kormidlu, je najspoľahlivejšie pomocou kovových vidličiek s čapom (najčastejšie používané v RC modeloch), ktoré sa naskrutkujú priamo na závit na konci tiahla (obr.10) a poistia proti povoleniu vibráciami kontramatkou.
 obr.9
obr.9 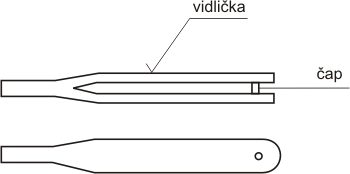 obr.10
obr.10