
Tento článok popisuje v krátkosti prvé skúšky projektu upútaného elektroletu. Ide o obdobie leta 2004, takže niektoré komponenty už dnes nie sú aktuálne. Napríklad batérie boli nahradené vyššou kapacitou, alebo časovač, kde prišlo k zmene komponentov.
z anglického originálu preložil Pavol Barbarič
Tento model bol pôvodne konštruovaný na spaľovací motor objemu 2,5 cm3, jeho hmotnosť bez paliva bola 700g. Chcel som dosiahnuť zodpovedajúcu hmotnosť, tak som použil najnovšie technológie, čo znamená použitie lítium-polymerových batérií a bezkomutátorového motora. Výhodou je najvýhodnejší pomer energia/hmotnosť u batérií a bezkomutátorový motor má lepší pomer výkon/hmotnosť ako motory jednosmerné.
Nasledujúci obrázok ukazuje model, narýchlo prerobený na elektro pohon. Je to vlastne iba testovací "stojan", ale na prvé skúšky vyhovujúci. Hmotnosť zostala zachovaná pôvodná, ako pred prestavbou. Batéria má síce nižšiu kapacitu, než by mala mať, ale aj tak - nepotrebujem palivo, takže hmotnosť je v poriadku.
Batéria LiPol 1500 mAh, síce trochu nižšej kapacity, ako by mala byť - nenašiel som v danú chvíľu batériu s vyššou kapacitou, aj keď viem o batériách s kapacitou 2Ah, schopných dodať stabilne 20A. Hmotnosť štyroch článkov je 120g a napätie pri vybití 12V. To znamená najnižšie použiteľné napätie, ak chceme dosiahnuť konštantnú rýchlosť. Batéria použitá v tomto modeli dodáva maximálne 10A, preto dosahujem len 120W konštantného príkonu. Ale to na testovanie úplne stačí. Výkon je dostatočný na vrtuľu 230/130mm, pri 11000 otáčkach vo vzduchu. Nasledujúci diagram ukazuje parametre zaťaženia vrtule, ale ako som spomenul, používam inú vrtuľu - moja má nižšie zaťaženie, je podobná vrtuli APC.
:-) Mám rád tento spôsob upevňovania - ako to robia RC modelári - všetko je tak jednoduché bez ricínu :-)

Motor je bezkomutátorový, Mega ACn 16/15/7, s hmotnosťou 76g. Maximálny odber 16A a maximálne napätie 16.8V. Tieto hodnoty teoreticky umožňujú výkon 270W, ale použitou batériou 12V a jej efektívnym prúdom 10A, nám výkon obmedzuje na 120W. Bezkomutátorové motory majú rôzne vinutia v jednom puzdre. Líšia sa výkonom, počtom otáčok a odporom. Použitý motor dosahuje 1300 ot/V, čo znamená 15600 ot pri 12 V. Pri zaťažení na 11000 ot, spotreba dosahuje 10 A. To znamená, že vrtuľa musí spĺňať kritériá v priemere a stúpaní (kvôli primeranej rýchlosti modelu). Takže zabudnite na to, čo ste sa naučili o vrtuliach pri spaľovacích motoroch. Pre elektromotor všetko platí inak. Vyššia záťaž a nižšie otáčky dávajú väčší výkon - presne naopak, ako u piestových motorov.

Regulátor je pre bezkomutátorový motor nutný. Regulátor tu spĺňa funkciu komutátora a preto motor bez príslušného zariadenia nefunguje. Pokiaľ viem, sú všetky riadené mikroprocesorom a sú jednoducho preprogramovateľné. Regulátor použitý pri testoch bol vyvinutý pre väčšie motory - do 40 A. Vybral som ho jednoducho preto, že ho plánujem použiť pre väčšie modely. Typicky sa používa obsluha signálom RC serva. Ale pre upútaný model je toto nevhodné, pretože ak batéria stráca energiu, znižuje sa aj napätie. A teda s konštantnou PWM moduláciou, alebo maximálnym výkonom, motoru klesajú otáčky. Pre naše použitie má regulátor trochu odlišnú funkciu. Povoľuje "testovať" batériu a vrtuľu, uložiť tieto parametre do pamäti a neskôr udržať proporcionálne otáčky k vstupnému signálu. Táto funkcia je vykonateľná na zemi a pomaly zvyšuje otáčky na vrtuli s plne nabitou batériou. Toto všetko je uložené do pamäti, neskôr impulz serva reguluje počet otáčky namiesto PWM. To znamená, že pokiaľ potrebujem polovičné, dostanem polovičné otáčky, namiesto polovičného výkonu z aktuálneho stavu batérie.. To v praxi znamená odstránenie problému s vybitím batérie. Jednoducho udržuje požadované otáčky, pokiaľ je napätie batérie dostatočné. Takže podobné chovanie ako motor s ladeným výfukom.
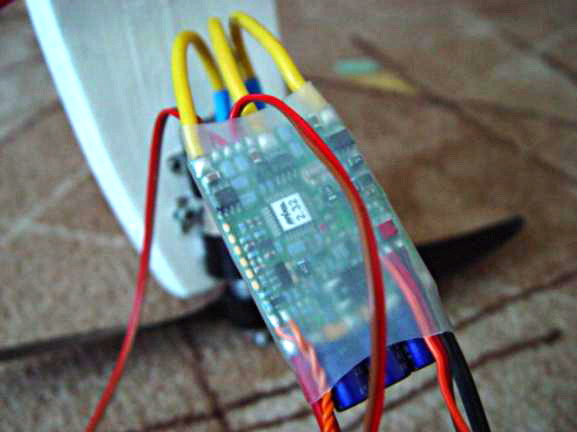
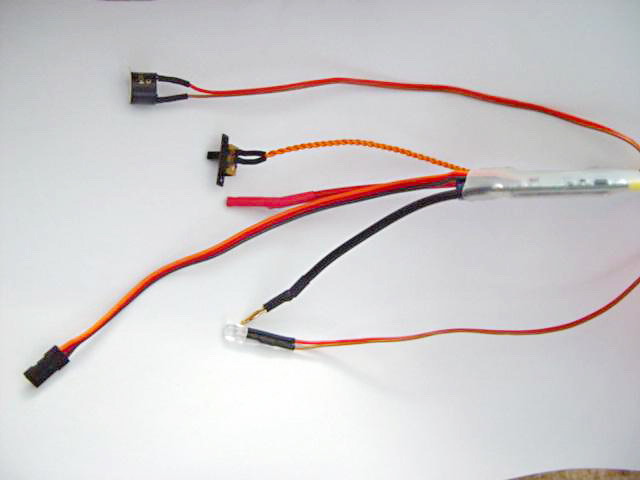
Motor "neukazuje" (znížením otáčok) nakoľko je batéria vybitá, preto je použitá LED signalizácia a bzučiak, ako výstraha pred úplným vybitím. Táto funkcia je tiež programovateľná a LED sú viditeľné na nasledujúcej fotografii: od vrchu - bzučiak, vypínač (zapína motor), červený "+" vodič, kábel signálu serva, čierny "-" vodič a LED. LED musí byť inštalovaná viditeľne na vnútornú stranu kruhu a neskôr môže signalizovať aj iné informácie.
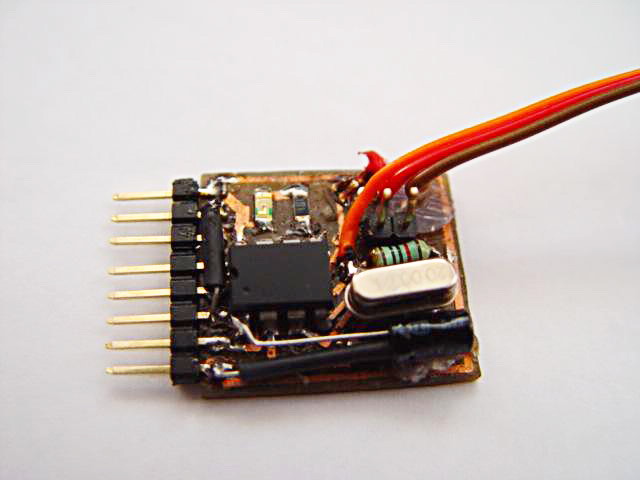
Časovač je v skutočnosti oddelený od regulátora a na prvé lety je ho dobré nahradiť mini prijímačom a a vysielačom. To umožní nájsť správne otáčky a vypnúť batériu ak sa niečo stane, alebo keď je vybitá. Časovač na obrázku používa PIC mikorkontrolér a generuje správny signál pre regulátor a určuje čas letu. Je osadný jedným trimrom, ktorý môže regulovať počet otáčok alebo letový čas. Toto je závislé na jumpri v časovači. Takže ním je nahradená ihla motora alebo sa ním dá nastaviť ako dlho chceme letieť. Druhá funkcia je vykonávaná automaticky, posledne uložené nastavenie je uložené do pamäti.

Tri kontakty (piny) na ľavej strane sú pre signál serva do regulátora a napájanie od regulátora. Ostatné piny slúžia na programovanie. Finálna verzia bude na SMD doske bez nich. V tejto verzii je použitý kryštál, ale zistil som, že s tu použitým regulátorom nie je potrebný. Regulátor je dostatočne stabilný aj s interným zdrojom časovania - to znamená, že polovica súčiastok tu nie je potrebná :-)
Takže, použitie je jednoduché. Pre prvé použitie potrebujeme pripojený jumper. V tomto režime regulujeme otáčky motora pomocou trimru. Potom vypneme jumper a regulátor použije uložené otáčky a nastavujeme dĺžku letu (zase trimrom). Keď máme nastavený správny letový čas, nie je potrebné trimer ďalej použiť. Iba keď je batéria príliš skoro vybitá, je potrebné skrátiť letový čas.
Medzi rečou, nepotrebujete zaťahovací podvozok? Zopár príkazov a... :-)